场效应管电机驱动 H桥电路原理详解
引言
在现代电子控制系统中,使用场效应管(MOSFET)构建H桥电路来驱动直流电机是一种高效且广泛应用的技术。无论是机器人、无人机还是各类自动化设备,都依赖于这种电路来实现电机的正反转、调速和制动。本文将深入探讨基于场效应管的H桥电机驱动原理,从核心器件到电路工作模式,进行系统性解析。
一、核心器件:场效应管(MOSFET)
场效应管是一种利用电场效应控制电流的半导体器件,是H桥电路的理想开关元件。其核心优势在于:
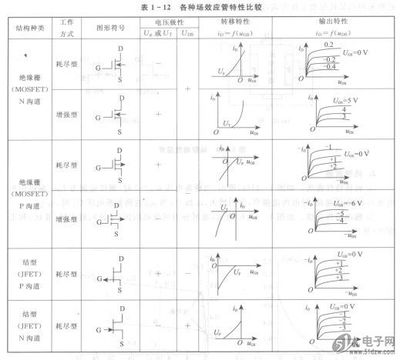
1. 电压控制:通过栅极(G)电压控制漏极(D)与源极(S)之间的导通与关断,驱动电路简单,功耗极低。
2. 导通电阻低:在完全导通状态下,漏源极间的电阻(Rds(on))非常小,这意味着在通过大电流时管耗(I²R)很小,效率高。
3. 开关速度快:允许高频PWM(脉宽调制)操作,从而实现电机的平滑调速。
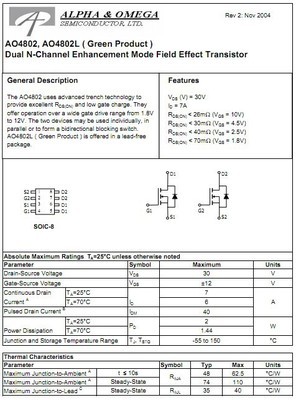
在电机驱动中,通常选用增强型N沟道和P沟道MOSFET搭配使用,或全部使用N沟道MOSFET(需配合自举升压电路)。
二、H桥电路拓扑结构
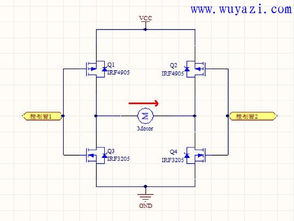
H桥电路因其电路形状酷似英文字母“H”而得名。它由四个开关元件(此处为MOSFET)构成桥臂,电机位于“H”的横杠位置。
- 四个开关(Q1, Q2, Q3, Q4):分别位于H的四个顶端。对角线上的一对开关(如Q1和Q4,或Q2和Q3)通常被同时控制。
- 电源(Vcc)与地(GND):分别连接在H的两条竖边上。
- 直流电机(M):连接在两个输出节点(A和B)之间。
三、工作原理:控制电机转向与调速
1. 正转控制
当需要电机正向旋转时,导通左上(Q1)和右下(Q4)的MOSFET,同时确保右上(Q2)和左下(Q3)完全关断。此时,电流路径为:Vcc → Q1 → 电机(A→B) → Q4 → GND。电流从A端流入B端流出,电机正向转动。
2. 反转控制
当需要电机反向旋转时,导通右上(Q2)和左下(Q3)的MOSFET,同时关断Q1和Q4。此时,电流路径为:Vcc → Q2 → 电机(B→A) → Q3 → GND。电流方向与正转时相反,电机反向转动。
3. 调速控制(PWM)
在维持上述导通逻辑(例如正转逻辑)的基础上,对其中一条通路(通常是低边MOSFET,如Q4)或同时对所有导通管施加高频PWM信号。通过快速开关MOSFET,改变电机两端电压的平均值(占空比),从而实现无级平滑调速。PWM频率通常选择在几千赫兹到几十千赫兹,以超越人耳听觉范围并兼顾开关损耗。
4. 制动与滑行
- 制动(刹车):可以快速导通两个低边管(Q3和Q4)或两个高边管(Q1和Q2),将电机绕组短路。此时电机惯性旋转产生的反电动势会形成回路电流,产生制动力矩,使电机快速停止。
- 滑行(高阻态):将所有四个MOSFET关断,电机两端悬空,靠惯性自由滑行至停止。
四、关键设计要点与注意事项
- 死区时间:在切换电机转向时,必须确保一对MOSFET完全关断后,另一对才能导通,否则会造成电源到地的直通短路,瞬间大电流可能烧毁MOSFET。这个强制延迟时间称为“死区时间”,通常由驱动芯片硬件或软件实现。
- 栅极驱动:MOSFET是电压控制器件,但其栅极存在寄生电容。为了快速开关,需要专用的栅极驱动芯片(如IR2104, DRV8873等)提供足够大的瞬间充放电电流,以减少开关损耗并防止管子处于线性放大区而过热。
- 续流与保护:电机是感性负载,开关关断时会产生很高的反向感应电动势(反峰电压)。必须在每个MOSFET的漏源极之间并联续流二极管(通常MOSFET内部已有体二极管,但有时需外接快速恢复二极管),为感应电流提供泄放回路,保护MOSFET不被击穿。
- 散热设计:尽管MOSFET导通电阻小,但在大电流和高频开关下仍会产生热量。必须根据电流计算损耗,并配备合适的散热片或采取其他散热措施。
- 电源去耦:在驱动电路电源入口处就近布置大容量电解电容和小容量陶瓷电容,以滤除因电机突变和开关动作引起的电源噪声和电压波动。
##
以场效应管为核心的H桥驱动电路,凭借其高效率、易控制、高可靠性的特点,已成为直流电机驱动的标准解决方案。深入理解其工作原理和设计细节,是成功构建稳定、高性能运动控制系统的基石。从简单的玩具车到精密的工业设备,这一经典电路的原理始终闪耀着智慧之光。
如若转载,请注明出处:http://www.whgaylk.com/product/27.html
更新时间:2026-06-19 11:24:26